Waveshare WAVE ROVER
7/10 под 1 кгМеталлический 4WD шасси + ESP32 «слейв» + UPS на 3×18650. Почти готов — без пайки. Нет RC-пульта — управление через WiFi и браузер.
Характеристики (официально)
| Параметр | Значение |
|---|---|
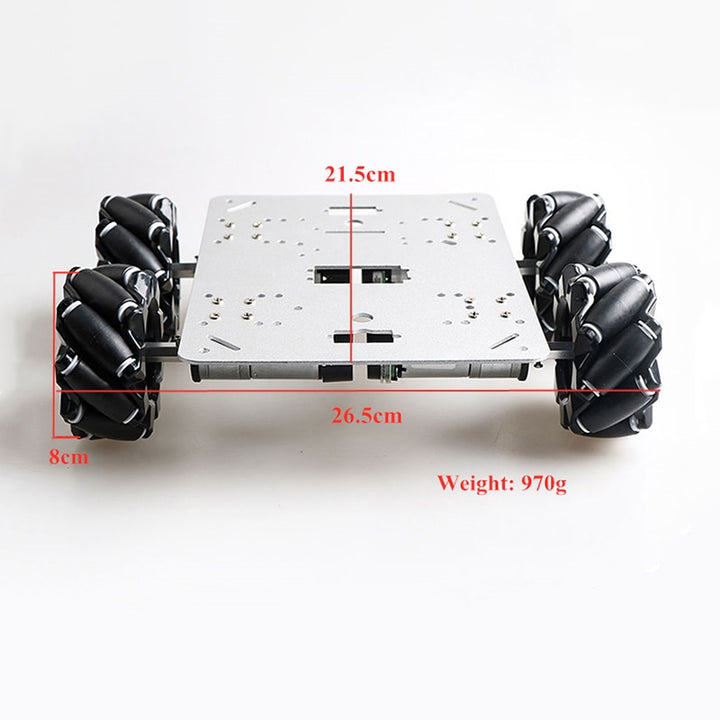
| Размер | 194 × 168 × 100 мм |
| Материал | Алюминий 5052, 2 мм |
| Моторы | N20 12V 200 RPM × 4 (без энкодера на WAVE ROVER) |
| Скорость | до 1.25 м/с |
| Груз | 0.8 кг (меньше чем 1 кг у CarryBot) |
| Вес шасси | 860 г (без батарей) |
| Колёса | Ø80 мм, резина, преодоление препятствий 40 мм |
| Подъём | до 22° |
| Батарея | 3 × 18650 в серии (~11.1V), НЕ в комплекте, ~7800 mAh если по 2600 mAh |
| Экран | OLED 0.91″ — WiFi, IP, напряжение |
| Датчики | 9-осевой IMU, INA219 (контроль заряда) |
| Связь | WiFi AP/STA, Bluetooth, UART, I2C, ESP-NOW |
| Верхняя площадка | Raspberry Pi / Jetson / LiDAR / камера (опционально) |
Что в коробке (рабочий минимум)
- ✅ Собранное металлическое шасси 4WD
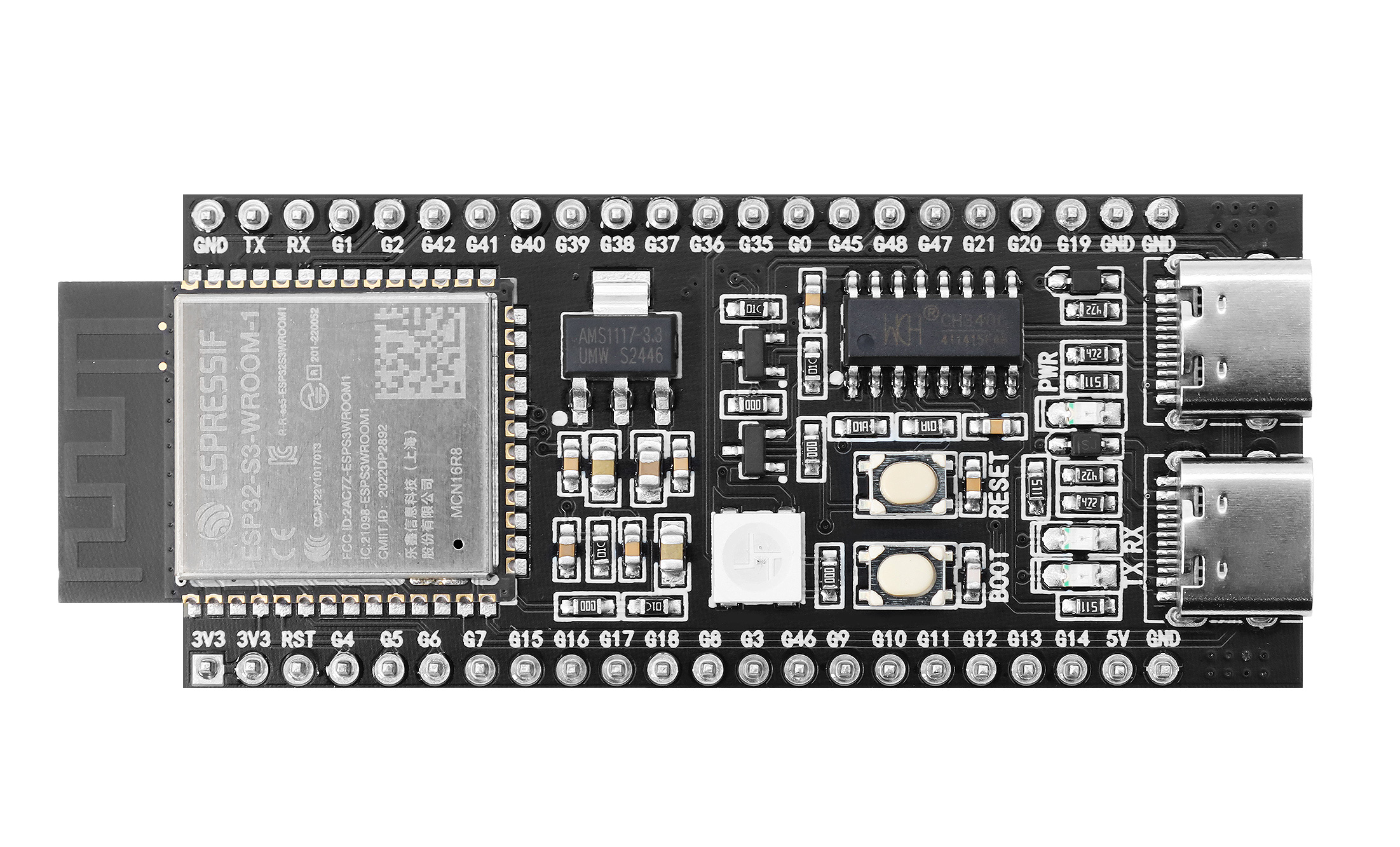
- ✅ Плата драйвера на ESP32 (General Driver for Robots)
- ✅ UPS-модуль 3S под 18650
- ✅ OLED, IMU, слот TF-карты
- ✅ Площадка расширения под «верхний компьютер»
- ❌ Батареи 18650 × 3 — купить отдельно (разряд ≥10A)
- ❌ RC-пульт — нет; только WiFi-веб
- ❌ Raspberry Pi / Jetson — опционально, не обязателен для езды
Как управлять — полная инструкция (из коробки)
Шаг 1. Вставь 3×18650 (полярность! LED не должен гореть при первом подключении).
Шаг 2. Включи питание. На OLED: строка AP: UGV, напряжение батареи.
Шаг 3. Телефон/ноутбук → WiFi сеть UGV, пароль 12345678.
Шаг 4. Браузер Google Chrome → адрес http://192.168.4.1.
Шаг 5. На веб-странице: стрелки направления, кнопки SLOW / MIDDLE / FAST.
Шаг 6. JSON-команды в окне FEEDBACK — для продвинутых (см. wiki).
Пример движения JSON: {"T":1,"L":0.5,"R":0.5} — оба борта вперёд. Heartbeat: если связь пропала — робот сам останавливается через ~3 с.
Режим STA (домашний WiFi): команда {"T":404,"ap_ssid":"UGV","ap_password":"12345678","sta_ssid":"ваш_WiFi","sta_password":"пароль"} — IP появится на OLED.
Нет пульта — что купить для «игрушечного» RC
| Вариант | Что купить | Как работает |
|---|---|---|
| 📱 Проще всего | Ничего — телефон | WiFi UGV → Chrome → 192.168.4.1 |
| 🎮 Gamepad | Bluetooth геймпад + скрипт на Pi/ПК | HTTP JSON на IP робота |
| 📡 ESP-NOW | Второй ESP32 с кнопками | Wiki: multicast/broadcast JSON |
| 🎮 RC как у CarryBot | FlySky FS-i6X + iA6B | Нужна перепрошивка ESP32 под PWM — не штатно; проще взять CarryBot-1K |
Плюсы и минусы
+ металл+ ESP32 готов+ open source+ IMU OLED− нет FlySky− 0.8 кг не 1 кг− ~1–2 ч не 8 км− батареи отдельно





